
比激光雷达还贵!红外热成像会成为自动驾驶的新宠?
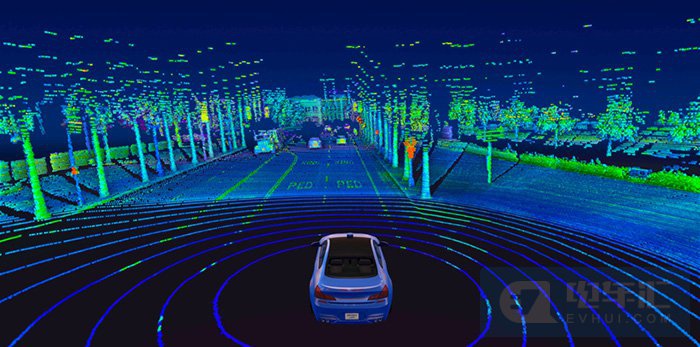
在自动驾驶的传感器选择上,目前在量产车型上主要有几种选择,一是视觉+毫米波雷达(当然现在特斯拉要走的…
在自动驾驶的传感器选择上,目前在量产车型上主要有几种选择,一是视觉+毫米波雷达(当然现在特斯拉要走的…
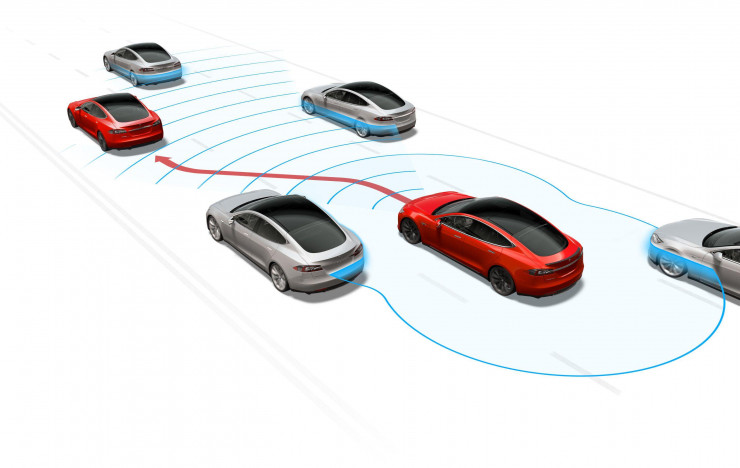
在自动驾驶的传感器选择上,目前在量产车型上主要有几种选择,一是视觉+毫米波雷达(当然现在特斯拉要走的…
先从红外传感 器说起 红外传感器 红外技术发展到现在,已经为大家所熟知,这种技术已经在现代科技、国防…
2022招聘专场

1 红外探测器是军工电子的核心元器件 1.1 红外线的特点及红外波段的划分 自然界的光线按照波长由短…

开工大吉

新春大吉

在伸手不见五指的房间里看到人或动物,在千米之外发现隐藏在密林中的敌人……这本是红外热像仪引以为豪的独…

热成像仪选购十大要点 我们自身很难有机会同时对比测试几款热成像仪,无法现场对比各品牌热成像仪的实际成…

红外热成像仪是红外传感器的诸多应用中非常重要的一种应用,从最初仅限于作为军用高科技产品,现在已经越来…

红外热像仪技术路线 红外探测器品质直接决定热像仪成像质量 红外探测器的分类:制冷与非制冷 氧化钒是非…
1.红外热像仪应用 热像仪作为一种红外成像仪器,不但在军事应用中占有很重要的地位,在民用方面也具有很…
